





















ผลิตภัณฑ์ทั้งหมด
-
กล้องอินฟราเรดพกพาอเนกประสงค์สำหรับการมองเห็นกลางคืน
-
หุ่นยนต์กำจัดวัตถุระเบิด
-
หุ่นยนต์สอดแนมขนาดเล็ก
-
การมองเห็นกลางคืนแบบดิจิตอลแบบตาเดียว
-
อุปกรณ์มองเห็นกลางคืนดิจิตอล
-
แอนติสไนเปอร์
-
ราดาร์พกพา
-
ไฟไฟบันทึกการลาดตระเวน
-
อุปกรณ์ปฏิบัติการพิเศษ
-
ขอบเขตปืนไรเฟิล
-
เครื่องวัดระยะด้วยเลเซอร์
-
รูปแบบทหาร
-
อุปกรณ์ยุทธศาสตร์
-
เครื่องล่อที่ลมได้
X-Y-Z จุดประสานงานหุ่นยนต์แขนขนาดกลางหุ่นยนต์ EOD







| สถานที่กำเนิด | จีน |
|---|---|
| ชื่อแบรนด์ | Particle |
| หมายเลขรุ่น | REOD500 |
| จำนวนสั่งซื้อขั้นต่ำ | 1 |
| ราคา | $205,761 |
| เงื่อนไขการชำระเงิน | T/T |

ติดต่อฉันเพื่อตัวอย่างฟรีและคูปอง
WhatsApp:0086 18588475571
วีแชท: 0086 18588475571
สกายเป้: sales10@aixton.com
หากคุณมีปัญหา เราให้ความช่วยเหลือออนไลน์ตลอด 24 ชั่วโมง
xรายละเอียดสินค้า
| ความเร็วสูงสุด | ≥2m/s(5 เกียร์ แปรผันอย่างต่อเนื่อง) | คุณสมบัติพิเศษ | ป้องกันการระเบิด, กันน้ำ, ความสามารถในการปลดอาวุธจากระยะไกล |
|---|---|---|---|
| ชื่อสินค้า | วัตถุประสงค์ของภารกิจ หุ่นยนต์ EOD Hound-III สำหรับมาตรการกำจัดและการถ่ายโอนอันตราย | ลักษณะ | 1. การออกแบบแขนกลที่มีความแข็งแรงสูง มอบประสิทธิภาพการฉกอันทรงพลัง 2 ระบบติดตามช่วงล่าง "คริสตี |
| น้ำหนักแพลตฟอร์มหุ่นยนต์ | ≤350กก. (บรรจุแบตเตอรี่) | ความลึกของระบบจานหุ่นยนต์ | ≥ 500 มม |
| การใช้งาน | การตอบสนองต่ออุปกรณ์ระเบิดชั่วคราว | ขนาดของแพลตฟอร์มหุ่นยนต์ | 1600×850×1300 มิลลิเมตร ((ครบถ้วน); |
| ขนาดหุ่นยนต์ | ≤950×650×650มม. (จัดเก็บเต็ม) | น้ำหนักหุ่นยนต์ | ≤50กก. (ประกอบด้วยแบตเตอรี่สองชุด) |
| ความ สามารถ ต่อ การ ปก ป้อง | ≥400MM | ตลอดความกว้างของช่อง | ≥400MM |
| เกรด | ≥45° | ปีนบันได | ≥45° |
| ความลึกของน้ํา | ≥200มม | อายุการใช้งานแบตเตอรี่ (อุณหภูมิปกติ) | ≥3ชม |
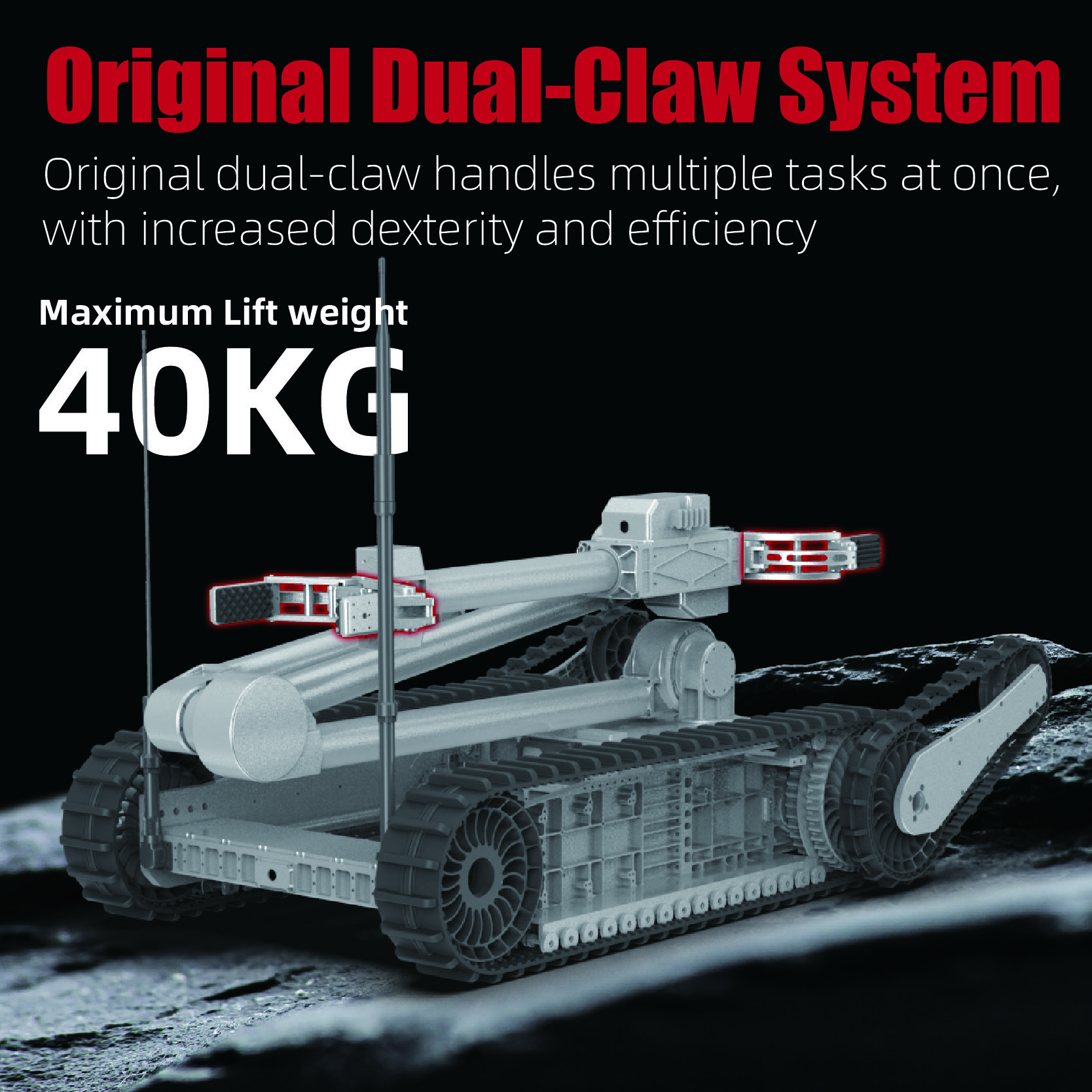
| ความยาวแขน | 2000มม | น้ำหนักฉกสูงสุด | ≥40กก |
| กรงเล็บ | 2 | ข้อต่อแบบเคลื่อนย้ายได้ | 8 |
| ขนาดตัวควบคุม | ≤270มม.×170มม.×100มม | ตัวควบคุมน้ำหนัก | ≤1.2กก. (ไม่มีกระเป๋าเป้สะพายหลัง) |
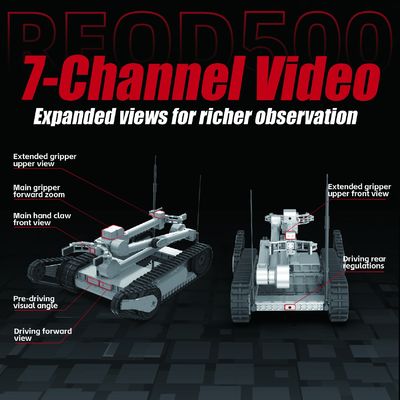
| หน้าจอแสดงผลคอนโทรลเลอร์ | จอแอลซีดีขนาด 7 นิ้ว | การแสดงวิดีโอ | 7 แชนเนล ซึ่งหนึ่งในนั้นมีฟังก์ชันซูมโฟกัสอัตโนมัติ |
| วิธีการดำเนินการ | การทํางานแบบสองแบบของ Button Rocker และ Touch Screen | วิธีควบคุม | การควบคุมสายเคเบิล≥100ม. (สายมาตรฐาน), การควบคุมแบบไร้สาย≥1000ม. (กลางแจ้ง) |
| เกรด IP ของแพลตฟอร์มหุ่นยนต์ | IP66 | เกรด IP ของแขน | IP66 |
| อุณหภูมิการทํางาน | -40°C~+50°C | อุณหภูมิในการจัดเก็บ | -45°C~+60°C |
| เน้น | โรบอตที่ทํางานประสานกัน,หุ่นยนต์กําจัดระเบิดขนาดกลาง,IP66 หุ่นยนต์ eod |
||
รายละเอียดสินค้า
ผู้ผลิตหุ่นยนต์ EOD ขนาดกลาง
คําอธิบายและลักษณะ
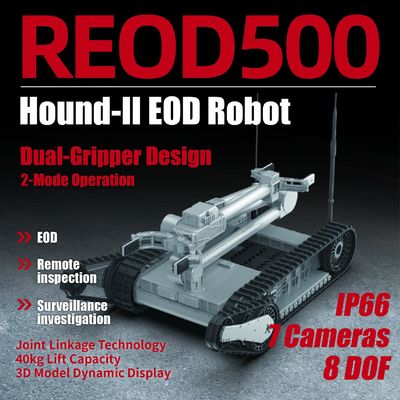
โรบอต JP REOD500 EOD เป็นทางออกที่ทันสมัยสําหรับการกําจัดระเบิด (EOD) ในสภาพแวดล้อมอันตรายสูงมีระบบเคลื่อนไหวด้วยแขนสวิง (swing-arm crawler system) ที่รวมตัวเคลื่อนไหวหลักกับกลไกอุปสรรคด้วยแขนสวิง (swing-arm obstacle mechanism), การออกแบบนี้ช่วยปรับปรุงความสามารถในการเคลื่อนไหวผ่านอุปสรรคของหุ่นยนต์ให้ดีขึ้นอย่างมาก โดยให้ความสามารถในการเคลื่อนไหวผ่านอุปสรรคที่แข็งแกร่งและน่าเชื่อถือในการดําเนินงาน EODหุ่นยนต์นี้มีแขนหุ่นยนต์ที่มีความอิสระหลายระดับ ที่ให้ความสามารถในการจับและการจัดการที่แข็งแรง. JP REOD500 มีขนาด ≤900mm × 650mm × 500mm (เก็บเต็ม) และน้ําหนัก ≤42kg มีความเร็วสูงสุด ≥2.0m/s, ระยะว่างอุปสรรค ≥320mmและความสามารถในการปรับระดับและการขึ้นบันไดสูงถึง 45 °, รับประกันความสามารถในการเคลื่อนไหวที่ดีกว่าในพื้นที่ต่าง ๆ
อุปกรณ์พร้อมกับเครื่องปรับ 8 องศาเสรีภาพ JP REOD500 ให้การควบคุมที่แม่นยํา ด้วยความสูงในการจับสูงสุด ≥ 1800mm (ข้อมือหลัก) และระยะการจับที่ไกลที่สุด ≥ 1400mm (ข้อมือหลัก)หุ่นยนต์รองรับการแสดงภาพ 7 ช่อง, ทําให้มีมุมมองการสังเกตที่รวยกว่า และมีความสามารถในการแสดงรูปร่าง 3D ระยะไกลในเวลาจริงมีการจัดอันดับ IP67 สําหรับความทนทานต่อฝุ่นและน้ํา, และวิธีการควบคุมที่รวมการควบคุมสายเคเบิลถึง 120 เมตร และการควบคุมไร้สายถึง 1200 เมตร, JP REOD500 ถูกสร้างขึ้นเพื่อความน่าเชื่อถือและความหลากหลายในสภาพที่ท้าทาย. นอกจากนี้,มันให้บริการ OEM และ ODM ทางเลือกการปรับแต่งเพื่อตอบสนองความต้องการการดําเนินงานเฉพาะเจาะจง.
การ ออกแบบ แขน เครื่องยนต์ ที่ ปรับปรุง
JP REOD500 มีการออกแบบแขนเครื่องจักรกลที่ปรับปรุงให้ดีขึ้น ซึ่งช่วยเพิ่มความสามารถในการจับได้อย่างสําคัญการ ออกแบบ ที่ มี ความ พัฒนาการ นี้ ทํา ให้ โรบ็อต สามารถ รับมือ กับ วัตถุ อันตราย ที่ หลากหลาย ได้ ด้วย ความ แม่นยํา และ ความ แข็งแรง มาก ขึ้น, เพิ่มประสิทธิภาพโดยรวมของกิจการ EOD.
การออกแบบบัตรสิทธิบัตรแบบนวัตกรรม "สองข้อมือ"
การออกแบบ "ข้อมือสองข้อมือ" ที่ได้รับสิทธิบัตร ทําให้เครื่องยนต์ JP REOD500 สามารถแก้ปัญหาหลายๆ เรื่องได้พร้อมกันเช่น การจับวัตถุขณะเปิดประตู หรือทําหน้าที่ช่วยอื่นๆทําให้มันมีประสิทธิภาพสูงสําหรับภารกิจ EOD
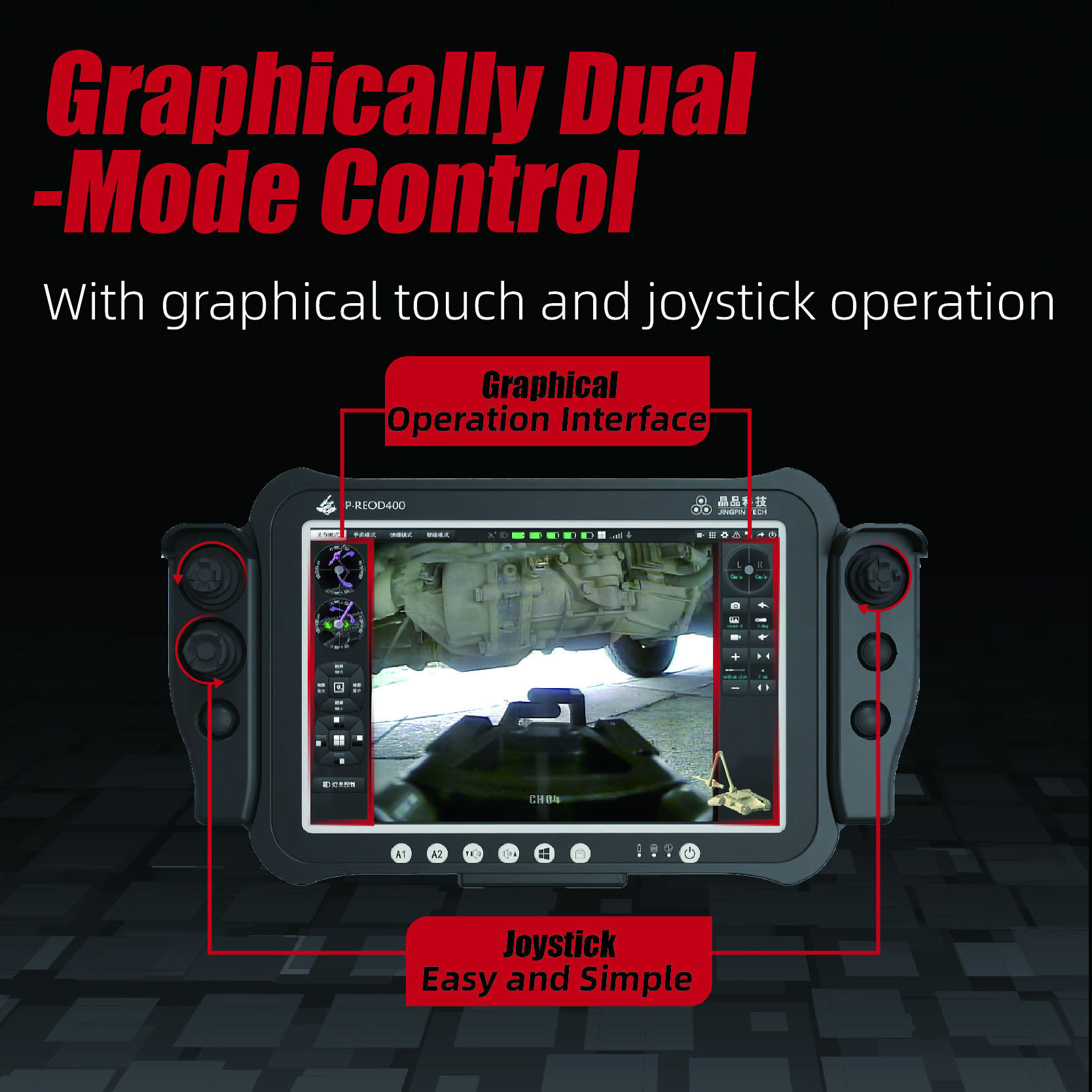
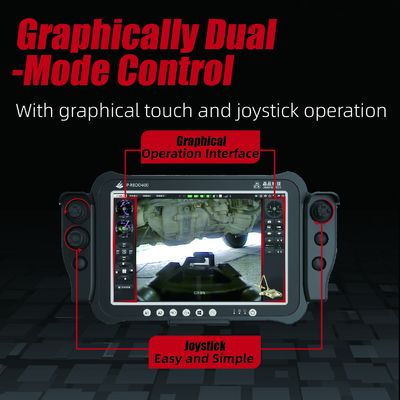
การใช้งานแบบสองโหมดแบบกราฟิก ✓ ประสบการณ์การใช้งานที่สะดวกและน่าเชื่อถือ
การทํางานแบบกราฟฟิกแบบสองโหมดให้ผู้ใช้งานกับอินทิวติวอฟเฟซสําหรับการควบคุมหุ่นยนต์ ทั้งจอสัมผัสและการควบคุม joystick ได้รับการสนับสนุนการประกันความสะดวกในการใช้งานและความน่าเชื่อถือในสภาพแวดล้อมความเครียดสูงการออกแบบนี้กําจัดความจําเป็นของผู้ใช้ในการจําฟังก์ชันปุ่มที่ซับซ้อน, ลดเวลาการฝึกอบรมและปรับปรุงประสิทธิภาพการดําเนินงาน
ช่องแสดงภาพระยะไกล 3 มิติ ในเวลาจริง ช่องแสดงภาพที่สวยงามอยู่ตรงหน้าคุณ
JP REOD500 ใช้เทคโนโลยีการแสดงภาพแบบ 3 มิติที่ทันสมัย เพื่อให้มีการตอบสนองในเวลาจริงของสถานะของหุ่นยนต์การให้ความเข้าใจแบบจินตนาการและละเอียดเกี่ยวกับตําแหน่งและสภาพแวดล้อมของหุ่นยนต์แม้ว่ามันจะทํางานอยู่เหนือสายตา
การออกแบบการควบคุมแบบปัญญาอ่อน ใส่สภาพการทํางานให้เป็นส่วนตัว
การออกแบบการควบคุม "การตั้งค่าล่วงหน้า" ที่ฉลาด ทําให้ JP REOD500 สามารถไปถึงตําแหน่งที่ตั้งค่าล่วงหน้าโดยอัตโนมัติด้วยการคลิกเดียว ตามความต้องการของผู้ใช้การลดปริมาณการลงมือที่จําเป็น และการรับประกันการดําเนินงานอย่างรวดเร็วและน่าเชื่อถือ.
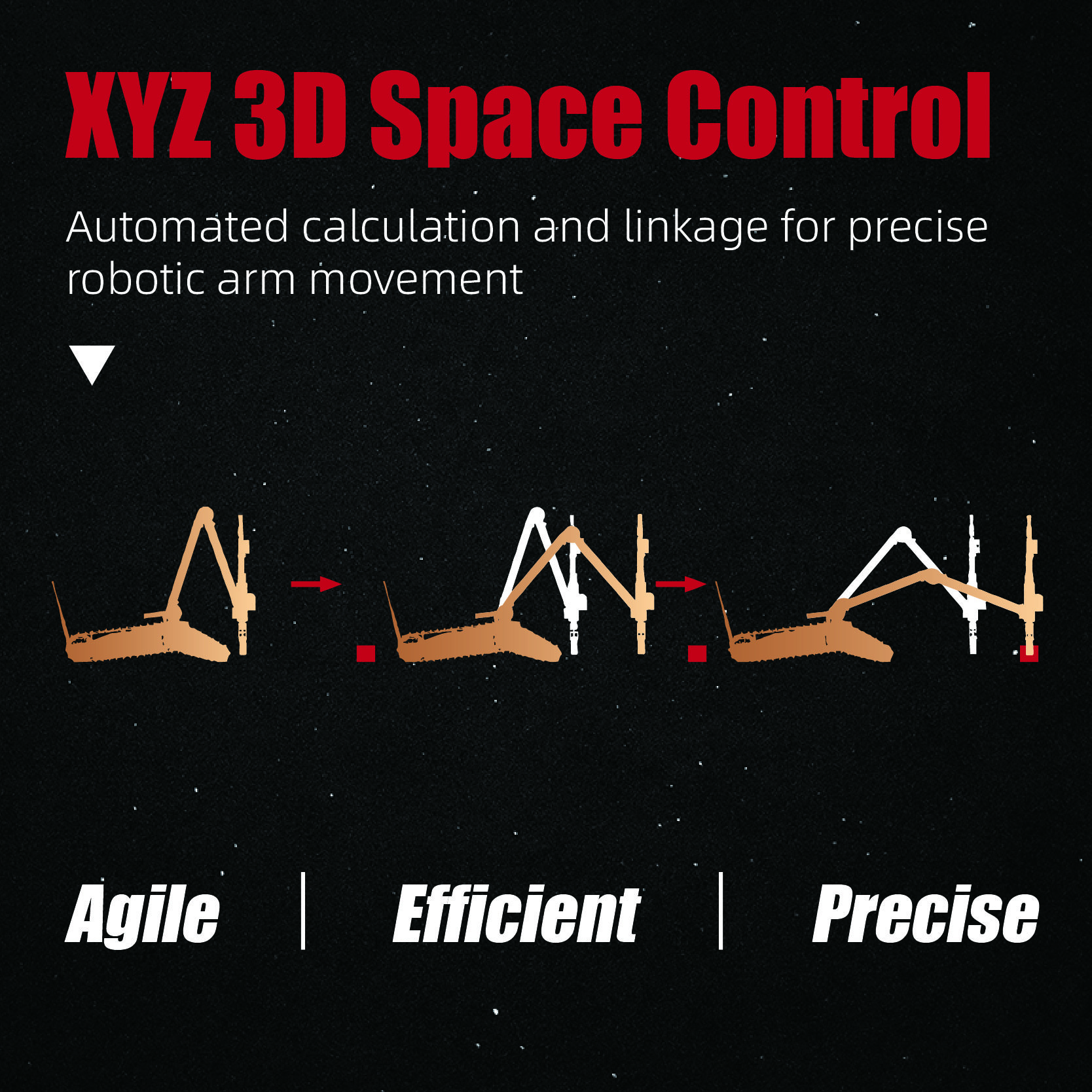
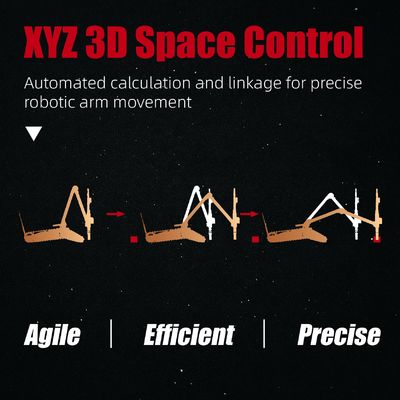
"X-Y-Z" สถานที่สามมิติ การออกแบบการเชื่อมโยงแขนหุ่นยนต์
JP REOD500 ใช้การออกแบบการเชื่อมโยงแขนหุ่นยนต์สามมิติ "X-Y-Z" โดยใช้การคํานวณอัตโนมัติ เพื่อให้มีการควบคุมการเคลื่อนไหวของหุ่นยนต์ได้อย่างแม่นยําการออกแบบนี้เพิ่มประสิทธิภาพและความแม่นยําของภารกิจการกําจัดระเบิด, ลดเวลาการทํางานโดยเฉลี่ยถึง 80% เมื่อเทียบกับการควบคุมต่อส่วนเดียวแบบดั้งเดิม
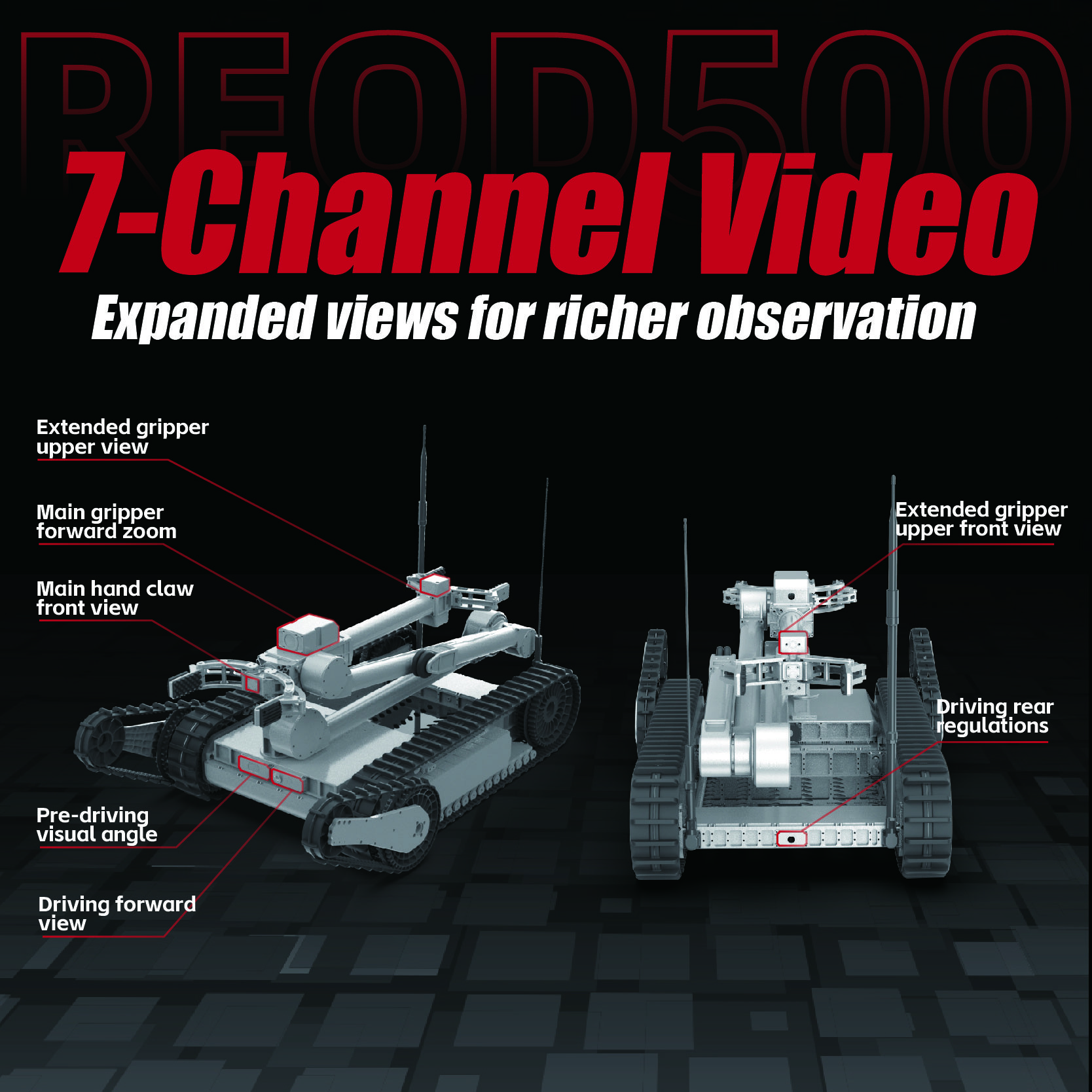
ระบบวีดีโอ 7 ช่อง ช่องชมที่รวยกว่า
มีระบบวีดีโอ 7 ช่อง JP REOD500 ให้มุมการสังเกตหลายมุม เพื่อเพิ่มความรู้สถานการณ์โหมดตัวจับหลัก, และลักษณะตัวจับช่วย ปรับตัวให้เข้ากับสภาพการทํางานเพื่อให้เห็นได้ดีที่สุด
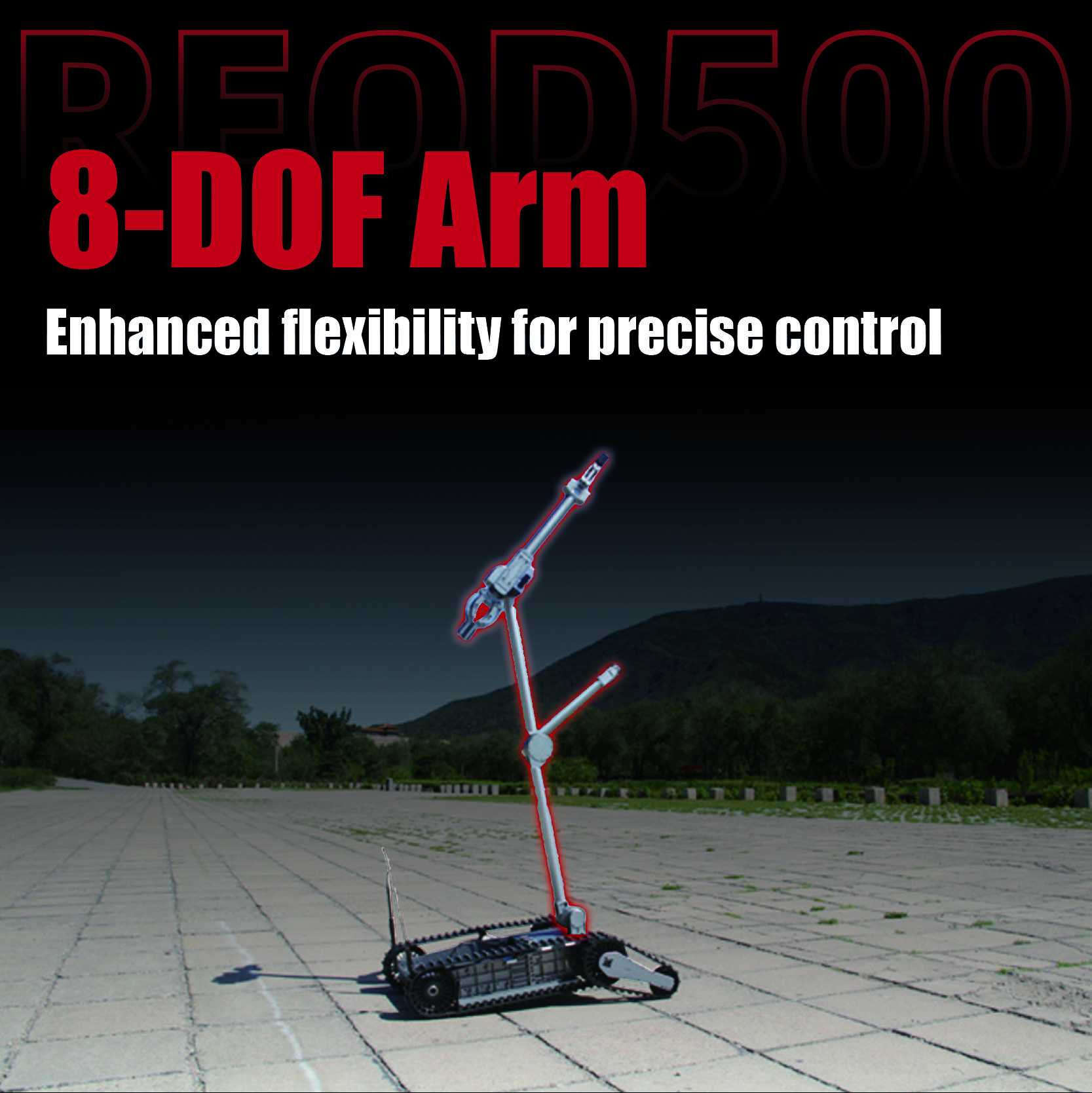
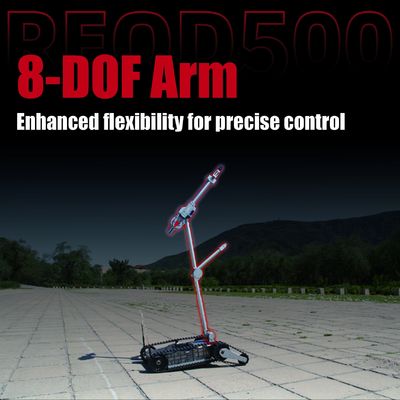
การออกแบบแขนหุ่นยนต์ 8 องศาเสรีภาพ
การออกแบบแขนหุ่นยนต์ 8 องศาเสรีภาพทําให้ JP REOD500 มีความสามารถในการใช้บริการในพื้นที่ที่เข้มแข็ง ทําให้มันสามารถดําเนินงานได้ในสภาพแวดล้อมสูง, ต่ํา, ลึก หรือบนโต๊ะ.ความยืดหยุ่นนี้ทําให้มันเหมาะสมสําหรับการดําเนินงาน EOD ที่ต้องการความแม่นยําและความสามารถปรับปรุง.
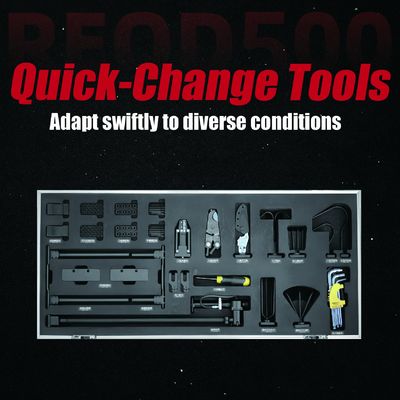
ระบบเครื่องมือที่เปลี่ยนเร็วและหลากหลาย
JP REOD500 พร้อมระบบเครื่องมือเปลี่ยนเร็วหลากหลาย รวมถึงชุดเครื่องมือจับหลายชุด ชุดเครื่องมือพื้นฐาน และชุดเครื่องมือขยายอุปกรณ์เหล่านี้สามารถเปลี่ยนออกอย่างรวดเร็วขึ้นอยู่กับความต้องการการดําเนินงานเฉพาะเจาะจง, ทําให้หุ่นยนต์สามารถปรับตัวได้อย่างต่อเนื่องกับสภาพการทํางานที่หลากหลาย และจัดการกับอันตรายต่างๆ ได้อย่างมีประสิทธิภาพ
การใช้งาน
แกลเลอรี่ภาพ
ปริมาตรเทคนิค
| โปรแกรมหุ่นยนต์ | |
|
ขนาด |
≤950×650×650mm ((ใส่เต็ม) |
|
น้ําหนัก |
≤50kg ((มีแบตเตอรี่ 2 ชุด) |
|
ความเร็วสูงสุด |
≥2m/s ((5 แรงสลับ, เปลี่ยนแปลงต่อเนื่อง) |
|
ความ สามารถ ต่อ การ ปก ป้อง |
≥ 400 มม |
|
ตลอดความกว้างของช่อง |
≥ 400 มม |
|
ความสามารถในการระดับ |
≥ 45° |
|
ขึ้นบันได |
≥ 45° |
|
ความลึกของน้ํา |
≥ 200 มม |
|
ระยะเวลาใช้งานของแบตเตอรี่ ((อุณหภูมิปกติ) |
≥ 3 ชั่วโมง |
|
ผลการจับแขนหุ่นยนต์ |
|
|
ความยาวแขน |
ขนาด 2000mm |
|
น้ําหนักสูงสุด |
≥40kg |
|
แขน |
2 |
|
สายต่อเคลื่อนที่ |
8 |
|
เครื่องควบคุมพกพา |
|
|
ขนาด |
≤ 270mm × 170mm × 100mm |
|
น้ําหนัก |
≤1.2kg ((ไม่รวมกระเป๋าเป้) |
|
หน้าจอแสดง |
7' LCD |
|
การแสดงวิดีโอ |
7 ช่อง, หนึ่งในนั้นมีฟังก์ชัน auto focus zoom |
|
วิธีการทํางาน |
การทํางานแบบสองแบบของปุ่มหมุนและจอสัมผัส |
|
วิธีควบคุม |
การควบคุมด้วยสายเคเบิล≥100m ((สายเคเบิลมาตรฐาน) การควบคุมโดยไร้สาย≥1000m ((ภายนอก) |
|
ระดับการป้องกันและความสามารถปรับตัวต่อสิ่งแวดล้อม |
|
|
โปรแกรมหุ่นยนต์ |
IP66 |
|
แขน |
IP66 |
|
อุณหภูมิการทํางาน |
-40°C+50°C |
|
อุณหภูมิในการเก็บ |
-45°C+60°C |
ติดต่อเรา
คุณเอมี่
อีเมล:amy-huang@mysmech.com
แนะนำผลิตภัณฑ์