





















ผลิตภัณฑ์ทั้งหมด
-
กล้องอินฟราเรดพกพาอเนกประสงค์สำหรับการมองเห็นกลางคืน
-
หุ่นยนต์กำจัดวัตถุระเบิด
-
หุ่นยนต์สอดแนมขนาดเล็ก
-
การมองเห็นกลางคืนแบบดิจิตอลแบบตาเดียว
-
อุปกรณ์มองเห็นกลางคืนดิจิตอล
-
แอนติสไนเปอร์
-
ราดาร์พกพา
-
ไฟไฟบันทึกการลาดตระเวน
-
อุปกรณ์ปฏิบัติการพิเศษ
-
ขอบเขตปืนไรเฟิล
-
เครื่องวัดระยะด้วยเลเซอร์
-
รูปแบบทหาร
-
อุปกรณ์ยุทธศาสตร์
-
เครื่องล่อที่ลมได้
หุ่นยนต์ EOD สำหรับการเข้าใกล้และกำจัดอันตรายจากวัตถุระเบิดอย่างปลอดภัย








| สถานที่กำเนิด | จีน |
|---|---|
| ชื่อแบรนด์ | Particle |
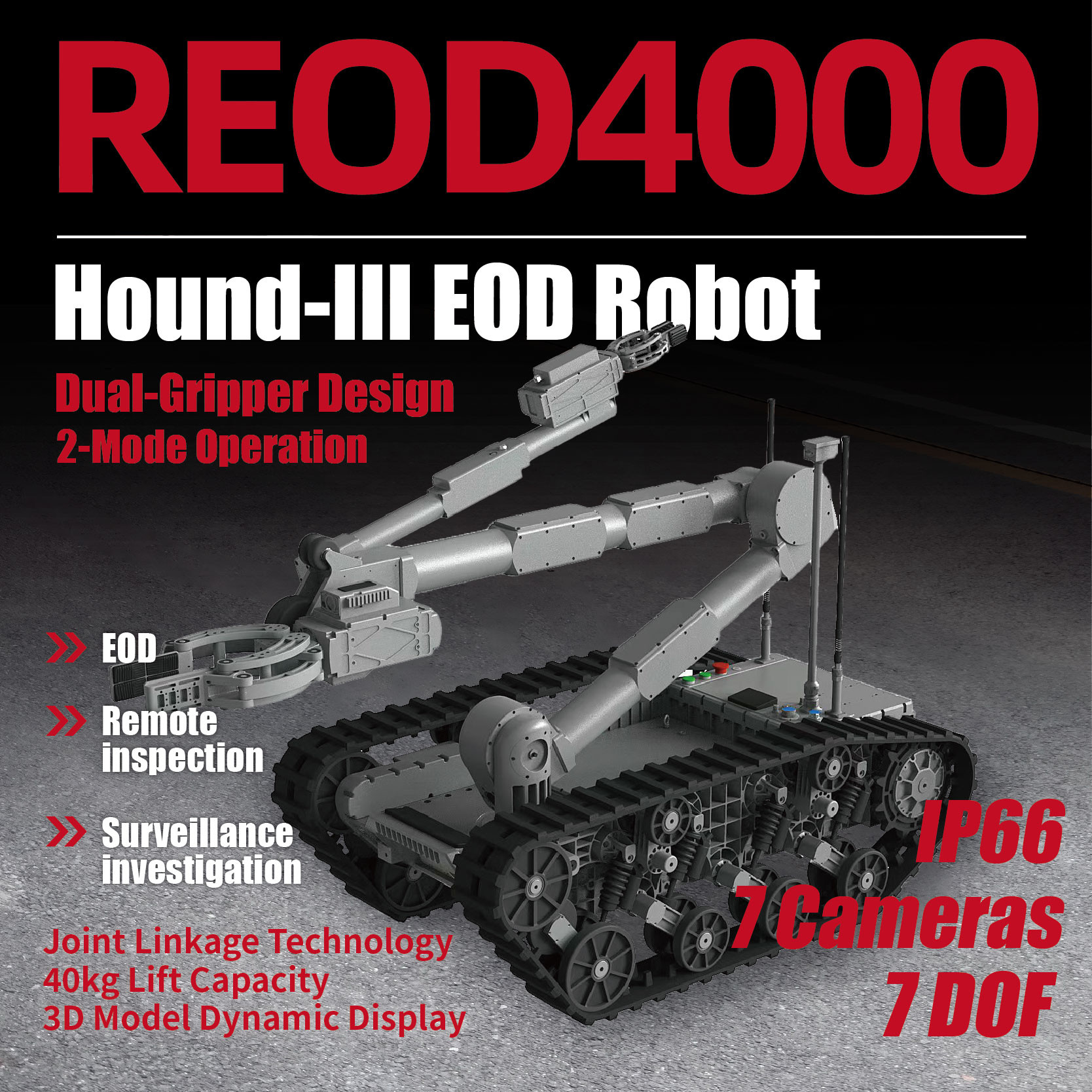
| หมายเลขรุ่น | REOD4000 |
| จำนวนสั่งซื้อขั้นต่ำ | 1 |
| ราคา | $356,653 |
| เงื่อนไขการชำระเงิน | T/T |

ติดต่อฉันเพื่อตัวอย่างฟรีและคูปอง
WhatsApp:0086 18588475571
วีแชท: 0086 18588475571
สกายเป้: sales10@aixton.com
หากคุณมีปัญหา เราให้ความช่วยเหลือออนไลน์ตลอด 24 ชั่วโมง
xรายละเอียดสินค้า
| สี | สีดำ | การสนับสนุนที่กำหนดเอง | OED,ODM,OBM |
|---|---|---|---|
| ความ สามารถ ต่อ การ ปก ป้อง | ≥400MM | ความสามารถในการไล่ระดับ | ≥45º |
| ความลึกของน้ํา | ≥500มม | ระยะการจับสูงสุด | 2.6ม |
| เส้นผ่านศูนย์กลางการจับสูงสุด | ≥355มม | ข้อต่อแบบเคลื่อนย้ายได้ | 7 |
| วิธีการควบคุม | การควบคุมสายเคเบิล≥200ม. (สายเคเบิลมาตรฐาน), การควบคุมแบบไร้สาย≥1,000ม. (กลางแจ้ง) | อุณหภูมิในการจัดเก็บ | -45°C~+60°C |
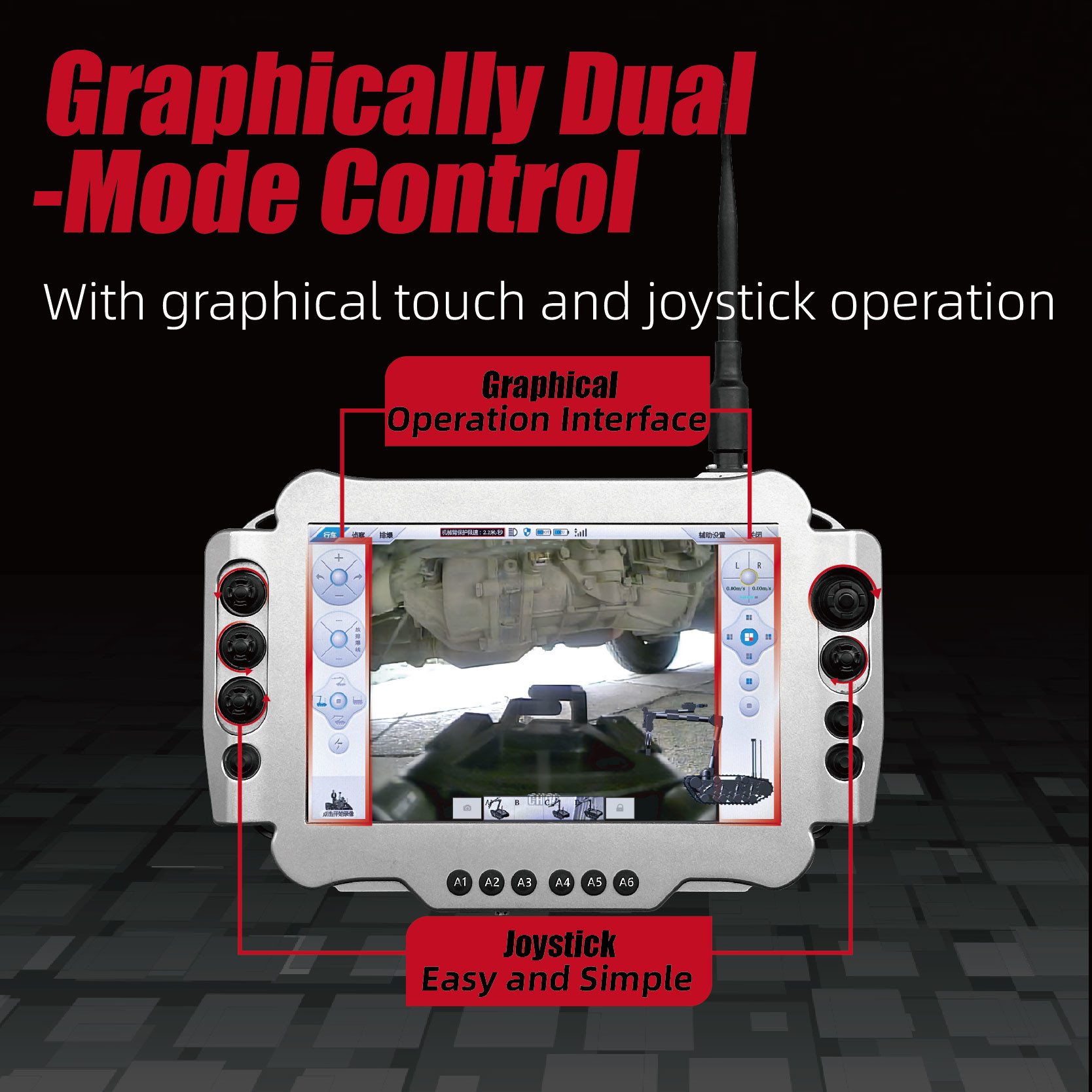
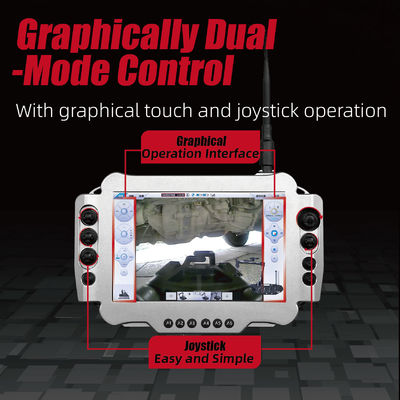
| วิธีการดำเนินงาน | การทํางานแบบสองแบบของ Button Rocker และ Touch Screen | หน้าจอแสดงผลคอนโทรลเลอร์ | ≥12'' จอแอลซีดี |
| ขนาดคอนโทรลเลอร์ | ≤400×300×100มม | ความลึกในการจับสูงสุด | 2.2m |
| น้ำหนักจับสูงสุด | ≥200กก | อุณหภูมิในการทำงาน | -40℃~+50℃ |
| เกรดไอพี | IP66 | น้ำหนัก | ≤350กก. (มีแบตเตอรี่) |
| อายุการใช้งานแบตเตอรี่ (อุณหภูมิปกติ) | ≥10ชม. | ความสามารถในการผ่านความลาดชันสูงสุด | 35 ° |
| ตลอดความกว้างของช่อง | ≥800มม | ความเร็วสูงสุด | ≥5ม./วินาที |
| ขนาดหุ่นยนต์ | 1600×850×1300 มม. (จัดเก็บจนเต็ม) | ||
| เน้น | อุปกรณ์มองเห็นกลางคืนอินฟราเรดหลายฟังก์ชัน,อุปกรณ์มองเห็นกลางคืนในอินฟราเรดมือถือ,อุปกรณ์มองเห็นกลางคืน IP67 |
||
รายละเอียดสินค้า
หุ่นยนต์ EOD สำหรับการเข้าใกล้และการกำจัดสิ่งอันตรายจากวัตถุระเบิดอย่างปลอดภัย
คำอธิบายและคุณสมบัติ
หุ่นยนต์ EOD รุ่น JP REOD4000 เป็นโซลูชันขนาดกลางขั้นสูงสำหรับการกำจัดวัตถุระเบิด (EOD) ในสภาพแวดล้อมที่มีความเสี่ยงสูง ด้วยแขนหุ่นยนต์ 7 องศาอิสระที่ทรงพลัง ทำให้ผู้ปฏิบัติงานสามารถจัดการวัตถุอันตรายได้อย่างแม่นยำ เพื่อความปลอดภัยสูงสุดในสภาพแวดล้อมที่จำกัดหรือซับซ้อน ระบบช่วงล่าง "Christie" ให้ความคล่องตัวที่ราบรื่นบนภูมิประเทศที่ไม่เรียบและซับซ้อน ทำให้ REOD4000 เหมาะสำหรับสภาพแวดล้อมนอกถนนและสภาพแวดล้อมที่ท้าทาย ด้วยน้ำหนักการคว้าสูงสุด 200 กก. จึงมีประสิทธิภาพเหนือกว่าคู่แข่งอย่างมาก โดยให้การสนับสนุนที่เชื่อถือได้สำหรับการกำจัดวัตถุระเบิด ความปลอดภัยสาธารณะ และสถานการณ์ฉุกเฉิน
REOD4000 มีขนาด 1600 มม. × 850 มม. × 1300 มม. (เมื่อจัดเก็บเต็มที่) และมีน้ำหนัก ≤350 กก. ซึ่งรับประกันทั้งความสามารถและความคล่องตัว มีความเร็วสูงสุด ≥5 ม./วินาที การกวาดสิ่งกีดขวาง ≥400 มม. และความสามารถในการไต่ ≥45° ซึ่งให้ความคล่องตัวและความสามารถในการปรับตัวที่เหนือกว่าในภูมิประเทศต่างๆ REOD4000 ติดตั้งระบบการทำงานระยะไกล สามารถเข้าใกล้พื้นที่อันตราย ตรวจสอบอันตรายที่อาจเกิดขึ้น และดำเนินการกำจัดได้อย่างมีประสิทธิภาพ ลดความเสี่ยงต่อบุคลากร
![]()
การออกแบบแขนกลความแข็งแรงสูง — ปรับปรุงประสิทธิภาพการคว้า
ด้วย "การออกแบบแขนกลความแข็งแรงสูง" หุ่นยนต์จึงติดตั้งประสิทธิภาพการคว้าที่ทรงพลัง ทำให้สามารถจับและจัดการวัตถุได้อย่างง่ายดาย ซึ่งช่วยเพิ่มประสิทธิภาพและประสิทธิผลในการปฏิบัติงานในสภาพแวดล้อมที่ท้าทายได้อย่างมาก
![]()
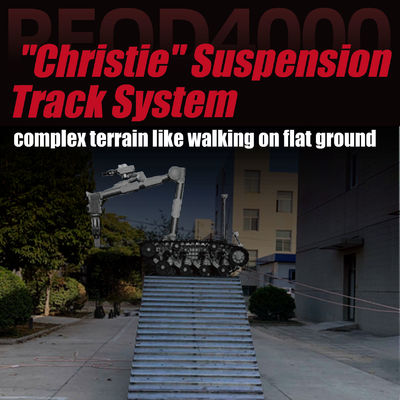
ระบบรางช่วงล่าง "Christie" — การนำทางบนภูมิประเทศที่ซับซ้อนได้อย่างง่ายดาย
ด้วยระบบรางช่วงล่าง "Christie" หุ่นยนต์สามารถเคลื่อนที่ผ่านภูมิประเทศที่ซับซ้อนได้อย่างง่ายดายเหมือนกับการเดินบนพื้นราบ ระบบขั้นสูงนี้ช่วยให้การเคลื่อนไหวราบรื่นและมั่นคง ช่วยเพิ่มความคล่องตัวและประสิทธิภาพในสภาพแวดล้อมที่ขรุขระและไม่เรียบได้อย่างมาก
![]()
การทำงานแบบ Dual-Mode แบบกราฟิก — ประสบการณ์การทำงานที่สะดวกและเชื่อถือได้
ด้วยระบบ "การทำงานแบบ Dual-Mode แบบกราฟิก" ผู้ใช้สามารถสลับระหว่างโหมดได้อย่างราบรื่น มอบประสบการณ์การทำงานที่สะดวกและเชื่อถือได้ อินเทอร์เฟซที่ใช้งานง่ายช่วยให้ใช้งานง่าย แม้ในสถานการณ์ที่ต้องการ
![]()
การแสดงผลแบบเรียลไทม์ 3 มิติระยะไกล — ความแม่นยำเพียงปลายนิ้วสัมผัส
"การแสดงผลแบบเรียลไทม์ 3 มิติระยะไกล" นำการทำงานที่ดีมาอยู่ตรงหน้าคุณโดยตรง ช่วยให้คุณควบคุมและตรวจสอบงานได้อย่างแม่นยำอย่างที่ไม่เคยมีมาก่อน ไม่ว่าจะอยู่ไกลแค่ไหนก็ตาม
![]()
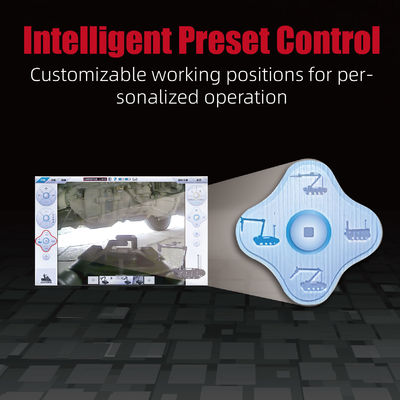
การออกแบบการควบคุม "Preset" อัจฉริยะ — การตั้งค่าท่าทางส่วนบุคคล
"การออกแบบการควบคุม 'Preset' อัจฉริยะ" ช่วยให้สามารถตั้งค่าท่าทางการทำงานส่วนบุคคลได้ ทำให้ผู้ปฏิบัติงานสามารถตั้งค่าตำแหน่งที่ต้องการไว้ล่วงหน้าและปรับปรุงการดำเนินการตามงานเพื่อให้มีประสิทธิภาพและความสะดวกสบายมากยิ่งขึ้น
![]()
ข้อต่อแขนหุ่นยนต์ 3 มิติ X-Y-Z — การควบคุมที่แม่นยำด้วยการคำนวณอัตโนมัติ
การออกแบบ "ข้อต่อแขนหุ่นยนต์สามมิติ X-Y-Z" ซึ่งอิงจากการคำนวณอัตโนมัติ ให้การควบคุมที่แม่นยำ ช่วยให้ผู้ใช้จัดการการเคลื่อนไหวที่ซับซ้อนได้อย่างง่ายดายด้วยความแม่นยำที่เพิ่มขึ้น
![]()
แอปพลิเคชัน
แกลเลอรีรูปภาพ
|
|
พารามิเตอร์ทางเทคนิค
| แพลตฟอร์มหุ่นยนต์ | |
| ขนาด | 1600×850×1300 มม. (เมื่อจัดเก็บเต็มที่) |
| น้ำหนัก | ≤350 กก. (รวมแบตเตอรี่) |
| ความเร็วสูงสุด | ≥5 ม./วินาที |
| ความสามารถในการข้ามสิ่งกีดขวาง | ≥400 มม. |
| ความกว้างของร่อง | ≥800 มม. |
| ความสามารถในการไต่ | ≥45º |
| ความสามารถในการผ่านความลาดชันสูงสุด | 35° |
| ความลึกในการลุยน้ำ | ≥500 มม. |
| อายุการใช้งานแบตเตอรี่ (อุณหภูมิปกติ) | ≥10 ชม. |
| ประสิทธิภาพการจับของแขนหุ่นยนต์ | |
| ระยะการจับสูงสุด | 2.6 ม. |
| น้ำหนักการจับสูงสุด | ≥200 กก. |
| เส้นผ่านศูนย์กลางการจับสูงสุด | ≥355 มม. |
| ความลึกในการจับสูงสุด | 2.2 ม. |
| ข้อต่อที่เคลื่อนย้ายได้ | 7 |
| ตัวควบคุมแบบพกพา | |
| ขนาด | ≤400×300×100 มม. (ไม่รวมเสาอากาศ) |
| น้ำหนัก | ≤3 กก. (ไม่มีกระเป๋าเป้) |
| หน้าจอแสดงผล | ≥12'' LCD |
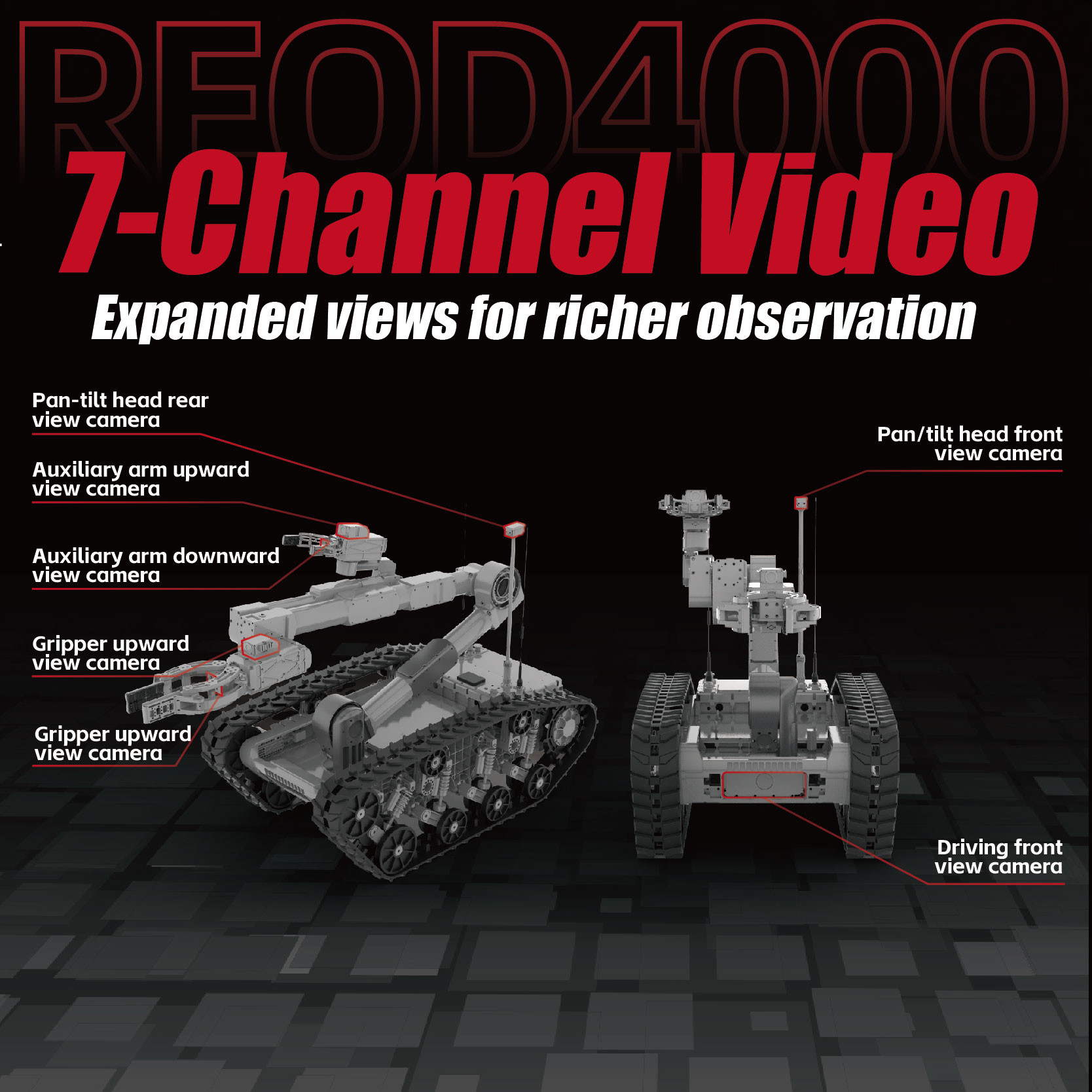
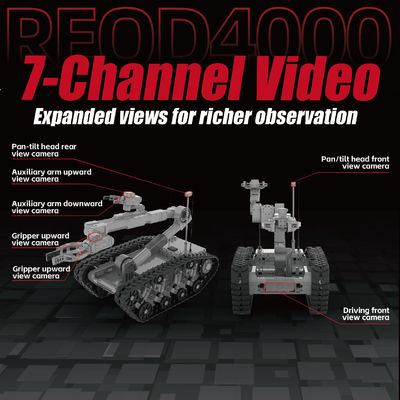
| การแสดงผลวิดีโอ | ≥7 ช่อง |
| วิธีการใช้งาน | การทำงานแบบ Dual-mode ของปุ่มโยกและหน้าจอสัมผัส |
| วิธีการควบคุม | การควบคุมด้วยสายเคเบิล ≥200 ม. (สายเคเบิลมาตรฐาน), การควบคุมแบบไร้สาย ≥1000 ม. (กลางแจ้ง) |
| ระดับการป้องกันและการปรับตัวเข้ากับสิ่งแวดล้อม | |
| แพลตฟอร์มหุ่นยนต์ | IP66 |
| แขน | IP66 |
| อุณหภูมิในการทำงาน | -40℃~+50℃ |
คุณเอมี่
whatsapp/wechat: +86 13621280280
แนะนำผลิตภัณฑ์